CAD Simulation of Pick and Place
MATLAB Analysis Using Peter Corke Toolbox
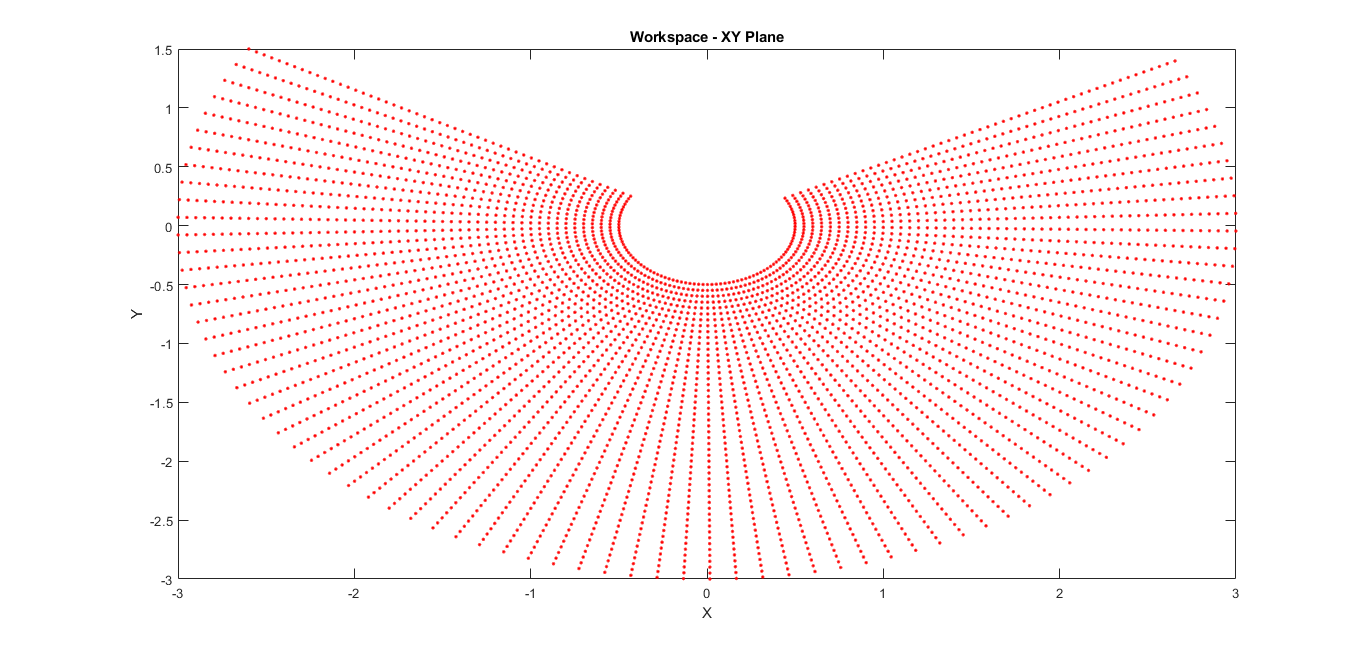
Workspace of the Manipulator
Project information
- Project Title: Warehouse Assistive Robotic Picker
- Affiliation: Columbia University
- Project Duration: Sep 2021 - Dec 2021
Project Description
Human Robot collisions takes place as shelves are moved using mobile robots in Warehouse for example "Amazon Warehouse". Alternative cost-effective reliable techniques avoiding collisions without removing the current mobile robots and not modifying much of human robot interaction were necessary. As part of solution we conceptualized pick and place of objects in warehouse by creating a 3 degree of freedom manipulator minimizing human collision. Manipulator Design was developed using SOLIDWORKS and the complete process of manipulation was simulated. Performed Kinematic Analysis in MATLAB using the Peter Corke Toolbox and enhanced trajectory generation by using 5th order polynomial while evaluating joint kinematics. Simulatenously, we examined the linear independency of 3 joints by computing Jacobian for multiple velocities and analysed reachable workspace.