
CAD Model of Tricopter
Delta Manipulator of Tricopter in Action!
Drop Test of Tricopter
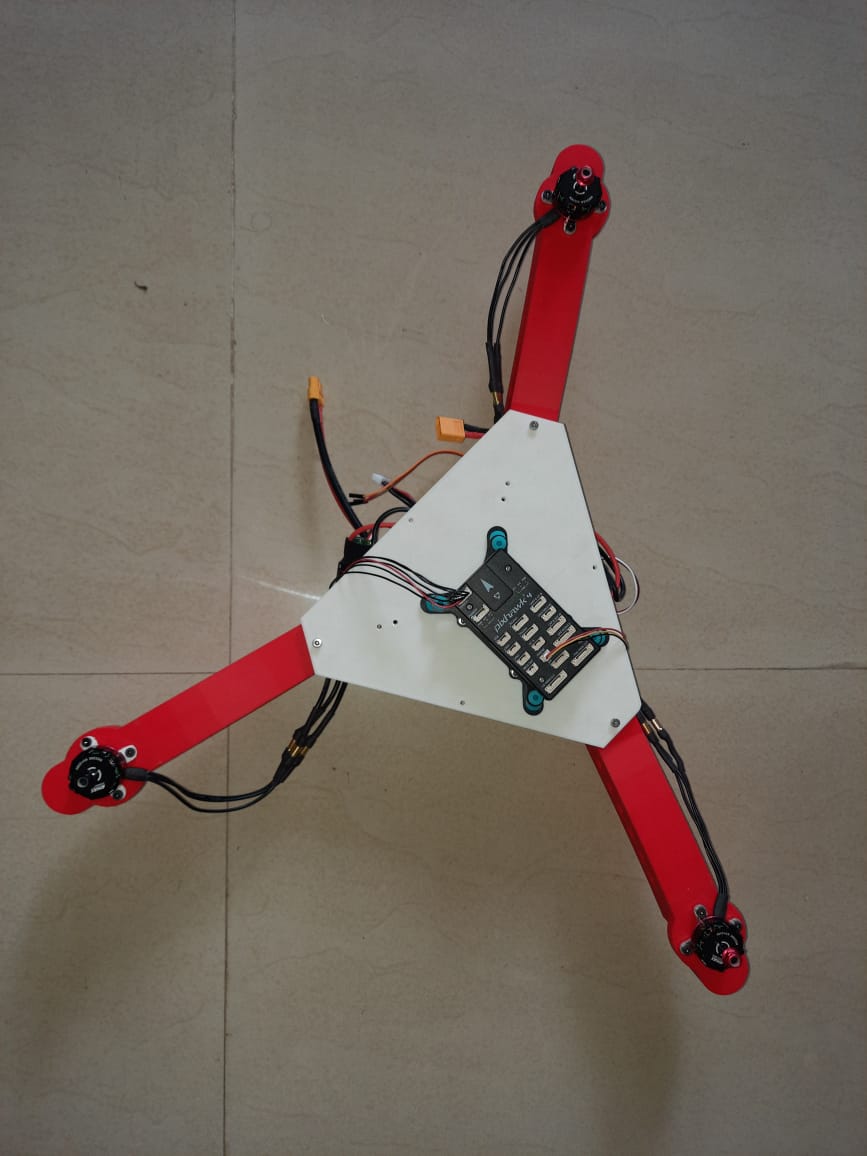
Fabricated and assembeled prototype of Tricopter

Fabricated and assembeled prototype of Delta Manipulator
Student Mechanism & Robot Design Competition Certificate conducted by ASME
Project information
- Project Title: Tricopter for Industry 4.0 Applications
- Affiliation: Robotics Innovations Lab, Indian Institute of Science
- Project Duration: Nov 2020 - Apr 2021
- Project URL: Video of Project
Project Description
The Goals of the project were to Develop a Novel Bio Inspired Tricopter with Manipulator for Industry 4.0 aerial manipulation tasks and Delta Manipulator for Aerial Manipulation As part of the project we devised bio inspired tricopter with porous wing design to reduce the weight without compromising the specific strength. Designed Delta Manipulator for Aerial Manipulation for the tricopter developed. Simulated the complete process of Aerial Animation in a digital twin. Fabricated the tricopter utilizing sustainable 3D printing techniques and reducing the weight by 12 percent. Fabricated the delta manipulator for agile manipulations and to lift metal objects up to 100 grams in an industrial environment. Submitted design by forming a team of two and qualified for the final round in Student Mechanism & Robot Design Competition (SMRDC) organized by American Society of Mechanical Engineers (ASME), 2021. Submitted Video