About
My objective is to create a significant impact on the lives of people around the globe, through a Mechanical Engineers and Roboticists vision.
I am a graduate student of Columbia University in the City of New York with a Master of Science - MS in Mechanical Engineering (Concentration: Robotics and Controls). My areas of interest are robot development, 3-D printing, robot design, analysis, optimization, control, robot perception, and robot learning. Recently in a team of four, we devised "Warehouse Assistive Robotic Picker", programmed "Weapon Detection using Neural Network" and conducted multiple experiments using Microcontroller. I have gained lots of experience in aerial robots, digital twin, and soft robotics during my previous internship as Research Intern at Robotics Innovations Lab, IISc. During my project work at Central Manufacturing Technology Institute, I have devised, analyzed, manufactured, and tested vibration test fixtures for aerospace applications. I am a quick learner, team player and possess commendable managerial skills.
Key Achievements: Shardashish Fellowship awarded by Columbia University, and Six Gold Medals awarded by Siddaganga Institute of Technology

Roboticist & Mechanical Engineer
Passionate Roboticist | Aspiring Mechanical Engineering Professional | Interested in Robotics, Control, Manufacturing, Artificial Intelligence and Machine Learning | Shardashish Scholarship Fellow
- Phone: +1 (646)371-0387
- City: New York, USA
- Professional Affiliation: ASME, IEEE
- Degree: Master's of Science
- Affiliation: Columbia University
- Email ID: se2559@columbia.edu
Facts
I have indulged myself in academic projects, term projects and course projects. For my achievements I have been awarded Gold Medals and Fellowships.
Fellowship
Projects
Gold Medals
Awards
Skills
I have gained the following skills either by taking courses in university & MOOC or doing hands on projects during my internships.
Resume
Education
Master of Science (Concentration: Robotics and Controls)
Sep 2021 - Dec 2022
Columbia University, New York, NY
GPA: 3.75/4.00
Coursework: Intro to Robotics, Robot Studio, Intro to Control theory, Computer Vision using Machine Learning, Robot Learning, Data science, Mechatronics and Embedded Microcontroller
Bachelor of Engineering
Aug 2016 - Oct 2020
Siddaganga Institute of Technology, Tumkur, IN
GPA: 9.70/10.00
Coursework: Computer Aided Drawing, Rapid Prototyping,Machine Design, Fluid Mechanics, Thermodynamics, Automatic Control Engineering, Mechatronics, Manufacturing
Experience
ASML, Wilton
Jun 2022 - Present
Mechatronics and Controls Engineer, Intern
- Automated data extraction process of Calibration Performance & Diagnostic parameters from two location (Veldhoven and Wilton) by writing MATLAB scripts
- Performed Parametric and Non-parametric tests on extracted data to suggest whether a particular test could be skipped or not, resulting in 24% reduction of previous test time
- Collaborated with two peers to devise novel motion profile to increase the wafers per hour without additional motors
Robotics Innovations Lab, IISc, Bangalore, IN
Nov 2020 - Apr 2021
Research Intern
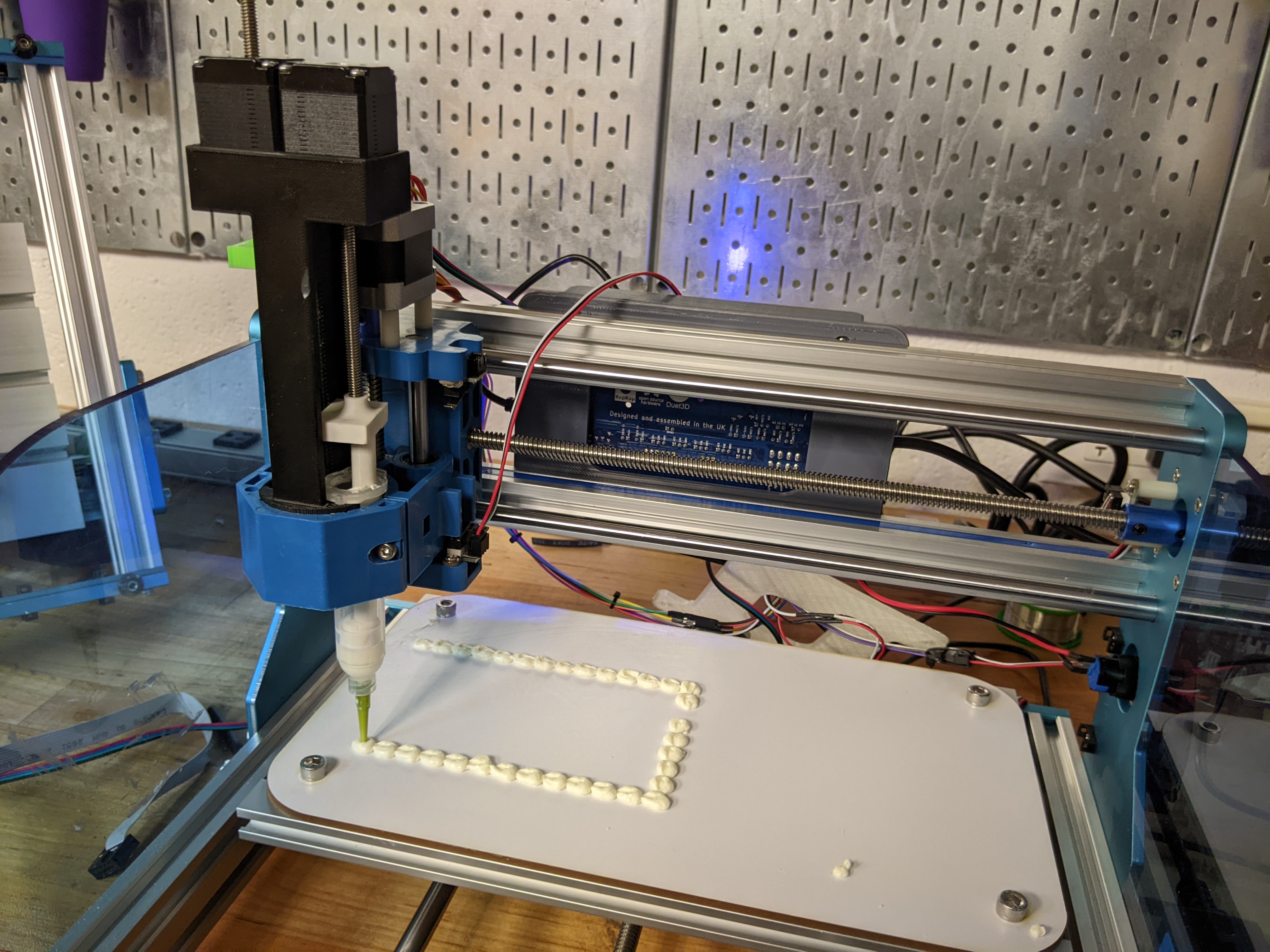
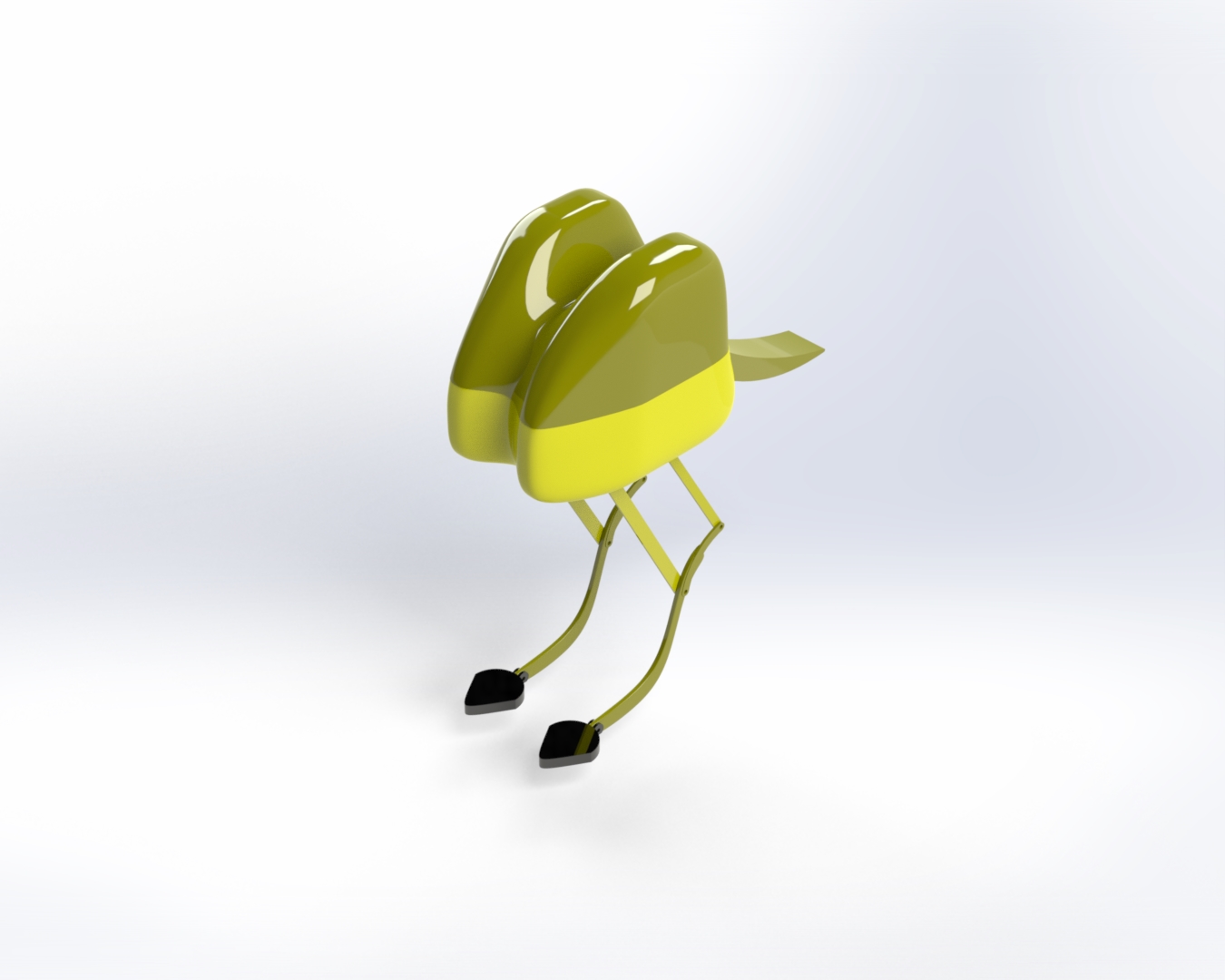
- Designed and optimized novel bio-inspired quadcopter and tricopter with delta manipulator for Industry 4.0 applications
- Fabricated the prototype utilizing sustainable 3D printing techniques and reducing the weight by 12%
- Conducted experiments for quadcopter operating Pixhawk flight controller and analyzed the output data deploying MATLAB tools
- Submitted design by forming a team of two and qualified for the final round in Student Mechanism & Robot Design Competition (SMRDC) organized by American Society of Mechanical Engineers (ASME), 2021
Projects
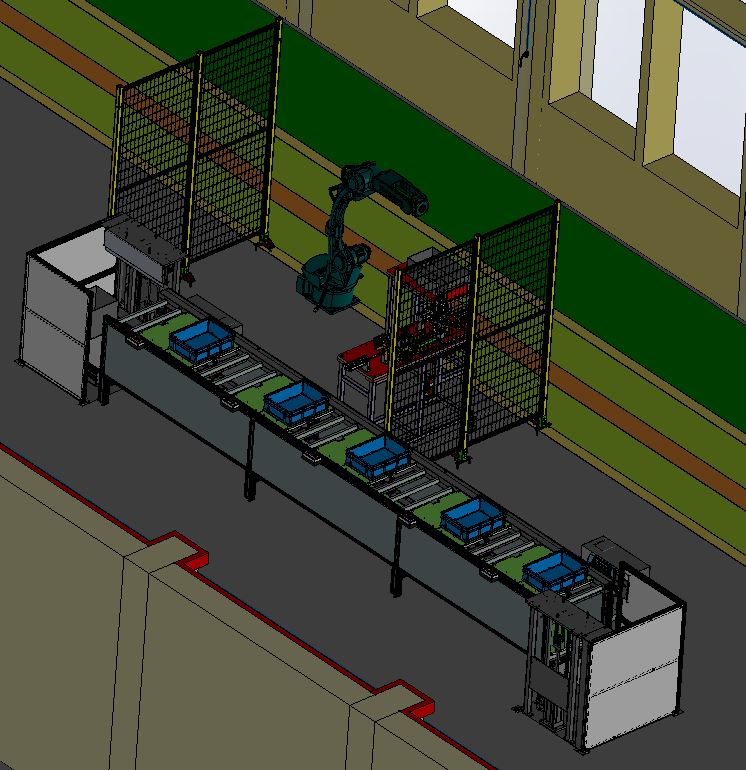
Warehouse Assistive Robotic Picker
Sep 2021 - Dec 2021
Columbia University, New York, NY
- Conceptualized pick and place of objects in warehouse by creating a 3 degree of freedom manipulator minimizing human collision
- Enhanced trajectory generation by using 5th order polynomial and evaluated joint kinematics
- Examined the linear independency of 3 joints by computing Jacobian for multiple velocities and analysed reachable workspace
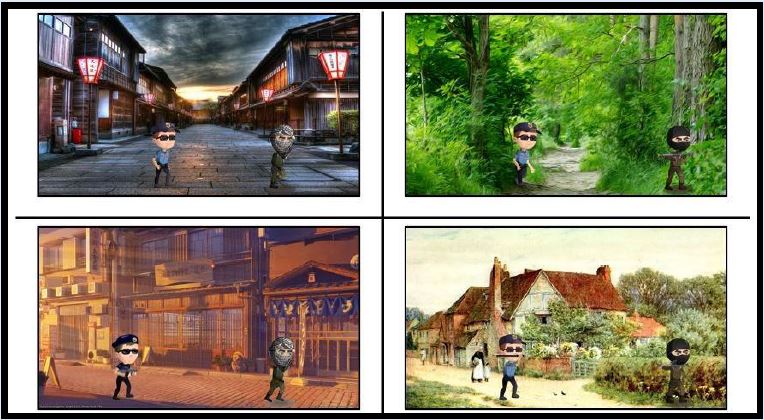
Application of Neural Networks for Weapon Detection
Sep 2021 - Dec 2021
Columbia University, New York, NY
- Generated 20,000 image dataset of 4 scenarios with characters and weapons using Python multithreading for parallelization
- Trained and tested the generated image dataset using ResNet 50, Inception v3, MobileNet by splitting the dataset as necessary
- Compared the accuracy and training time of all the three weapon detection algorithms
Vibrational Test Fixture for Aerospace Applications
Aug 2019 - Apr 2020
Siddaganga Institute of Technology, Tumkur, IN
- Designed vibration test fixture among a group of four leveraging SOLIDWORKS tool for three different aerospace applications for the constraints communicated by partner institute Central Manufacturing Technology Institute (CMTI), India
- Performed Strength, Modal and Harmonic Response analysis test using ANSYS workbench tool
- Optimized specific strength by 28 % and conducted Impact Hammer testing for the prototype to compare with analytical results
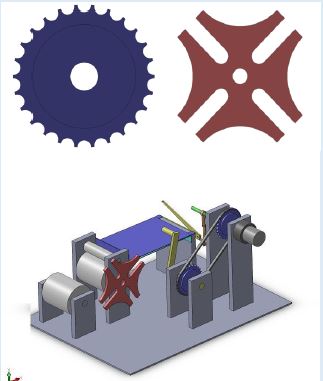
Automatic Paper Cutting Machine Using Geneva Mechanism
Aug 2018 - Apr 2019
Siddaganga Institute of Technology, Tumkur, IN
- Devised and calculated technical specifications required for Geneva mechanism and roller diameter
- Performed experiments to reduce vibrations by 9 % induced during operation deploying various damping techniques
Portfolio
This is glimpse of majority of my past work.A video, image gallery along with short description of my previous academic and internship projects.
(Click on the Image for details of the respective project)
- All Projects
- Academic Projects
- Internship Projects







Contact
Location:
Manhattan, New York, NY - 10022
Email:
se2559@columbia.edu
esrivatsa@gmail.com
Call:
+1 (646)371-0387